



































软件介绍
robotmaster破解版是软件的破解版本,在该版本中为用户集成了破解补丁,可以免费对软件进行激活,让用户使用软件的所有功能。这是一款机器人编程软件,可以进行机器人的离线编程,完成后可以进行模拟仿真,实现机器人的能动性,通过软件还能进行机器人各项信息属性的设定和编辑,对数据进行保存和处理,机器人编程软件 ABB、Fanuc、Kuka、Motoman、Staubli,Robotmaster是一个用于把CAD/CAM的程序转换成机器人程序的全集成模块。

软件功能
程序
为了成功启动图形界面,刀具操作需要一个合法的程序名。
数据如何生效
大多数数据是以全局的形式保存,一些数据(轴配置、优化曲线、过渡点和外部轴)是按照实际的刀具操作保存。在一个文件中,通过全局形式保存的数据是对所有的刀具操作生效的,而轴配置数据是根据不同刀具操作单独设置的。然而,如果设置了第一个刀具操作,除非单独进行配置,否则随后的刀具操作将会默认具有相同的轴配置参数,在处理刀具操作期间,程序将会保持激活的配置,直到遇到一个新的具有不同设置参数的刀具操作。
后处理器
后处理文件(*.mcpost)同时也包含了一些参数,这些参数可以配置输出的灵活性。在后处理过程中,存在可能性绕过参数并对所有参数直接进行硬编码的可能性。请参考后处理文件以获取正确的参数和关于该参数的解释。
请参考快速指南来了解如何进行产品初始化设定和如何使用通用功能。
模拟仿真
模拟仿真功能用来给用户提供机器人按照特定的轨迹运动的仿真。模拟仿真设置按钮允许用户设定要进行仿真的几何图形。当模拟仿真启动以后,只有选择了的刀具操作才会在模拟仿真中显示。请注意模拟仿真器不是运动规划器,模拟显示的关节运动可能和机器人真实运动有出入。
设定界面
图形见面允许用户输入机器人特性的信息和设置。一旦所有的信息输入完毕并点击OK按钮,各参数会被保存并且在后处理器处理刀具操作时生效。
软件特色
运行期强大上的设计能力解决加工难题
通过机床编程的方式配置加工方式
在执行CAM任务的时候更好对零件切割以及设计
有多个刀具可以配置,允许您加载刀具配置数据库
刀具路径是需要编辑的,提供一个工具栏让您找到所有配置方式
点击刀路文件可以设置NC机床经常使用的刀具
外形铁削(2D)-[WCs:俯视图]-[刀具面:俯视图]
刀路-34.2K- PLATE. NC-程序号码
机床类型可以在软件替换,可以通过配置机器人设置适合的机床
破解教程
1、下载得到Mastercam 2018 Chinese USB程序,将其打开
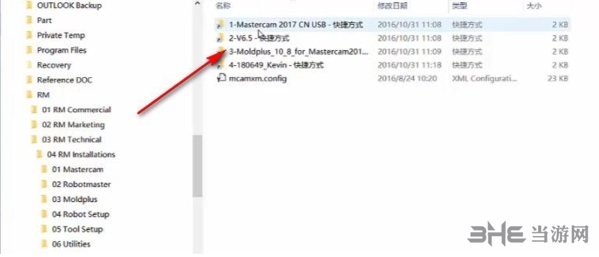
2、首先您需要安装 Mastercam 2017软件,将其安装到你的电脑
3、所有的配置数据都默认就可以了,不需要调整
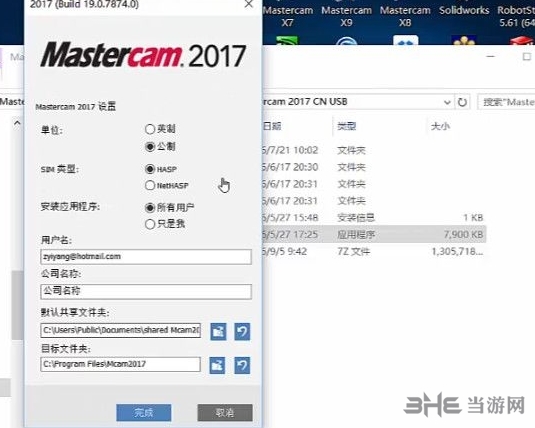
4、软件的协议,点击同意,软件自动进入安装,等待软件安装结束
5、提示正在删除软件,等待软件安装结束
6、直接退出就可以了。非常简单
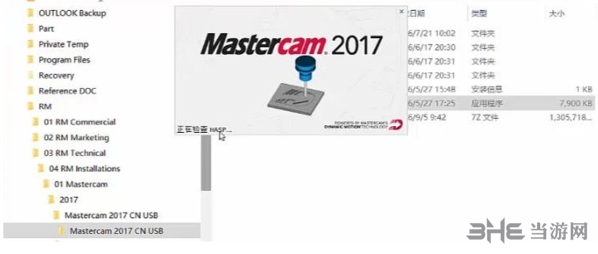
7、提示软件正在启动,点击关闭就可以了
8、打开2 Robotmaster-V6.6.529.exe执行安装,会显示安装向导

9、这里选择中文安装就可以了,点击下一步,需要加载几秒钟
10、等待软件加载结束,提示安装地址C:Program FilesHyperthermRobotmaster V6.6.529,勾选协议点击下一步
11、安装的组件默认就可以了
12、显示下载进度,等待软件复制数据到您的电脑
13、安装结束已有点击 3 Moldplus 11 for Mastercam2018.zip打开,将里面的setup.exe安装
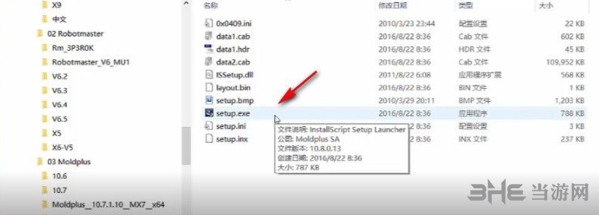
14、这里是软件的安装界面,等待软件进入安装,点击下一步直到安装结束

15、出现协议内容,点击接受就可以了
16、这里是安装数据的界面,等待数据复制结束
17、选择第四个文件夹打开,里面有配置文件
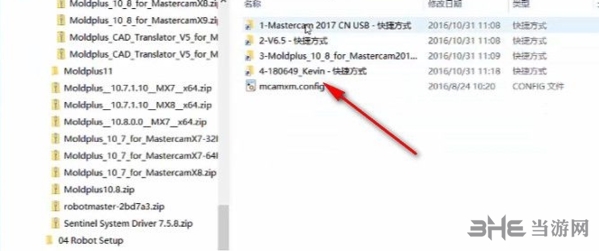
18、打开第一个出现查看内容,里面是电脑的配置内容
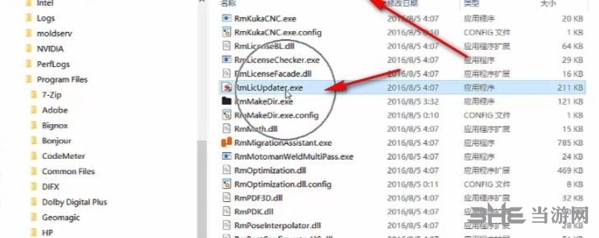
19、在软件的安装地址下找到一个程序,如下图,点击运行
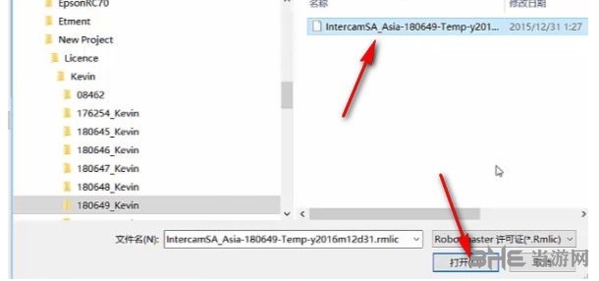
20、找到第四个文件夹将intercamSA这个出现打开
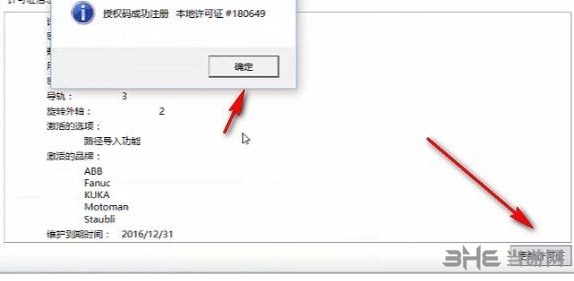
21、点击更新许可证,,提示注册成功
22、在桌面找到Mastercam2017打开使用,这样就可以进入软件了
23、这里是软件的界面,将软件关闭,复制mcamxm.config到软件的 my mcam2017 CONAG地址替换
24、现在您可以使用robotmaster了,这里是设计的区域







网友评论